Rapid Response - Unmanned Aerial Vehicle
Mission Objective - Fully-Autonomous Payload Delivery
RR - UAV
Six Rotor Configuration


Increased Payload Capacity
Enhanced Flight Stability
Improved Redundancy and fault tolerance


Critical Response
Reduces Critical Emergency Response Time
Enables Rapid AED Accessebility
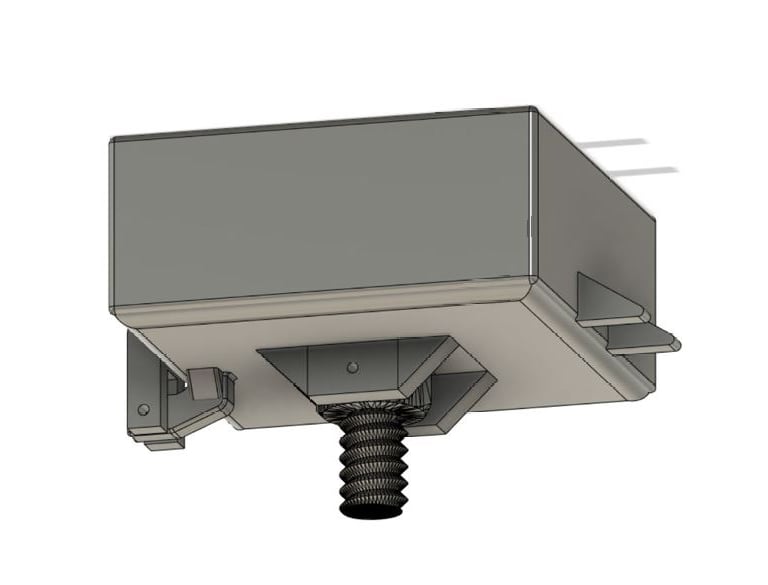
[PDS] Payload Deployment System
Precision Controlled Payload Depoloyment
Safe Parachute-Assisted Delivery
Lightweight Modular Design


Long Range Real-Time Control
Long-Range Real-Time Telemetry Control
Long-Range Real-Time Video Transmission
Real-Time Precise Manual Overide


ADS-B Integration
Real-Time Air Traffic Awareness
Enhanced Collision Avoidance Capabilities
Improved Airspace Safety Compliance
Airspace-aware Autonomous Navigation Support
Rapid Manufactering And System Optimisation
Lightweight structurally optimised components
Scalable and customizable system architecture
3D - Printing of the Payload Deployment System [PDS]
Achievement
QCSC Science Congress Competition
2nd Place




Awarded by a CERN scientict





Nation Science Congress Presentation
Representing Qatar
Future Enhancements
Fully-Autonomous PDS re-load system
Vision Based smart deployment
Vision/LIDAR-based tracking and obstacle avoidance
Modular and ergonomic PDS mounting system









Previous Iteration - Quad Rotor Configuration


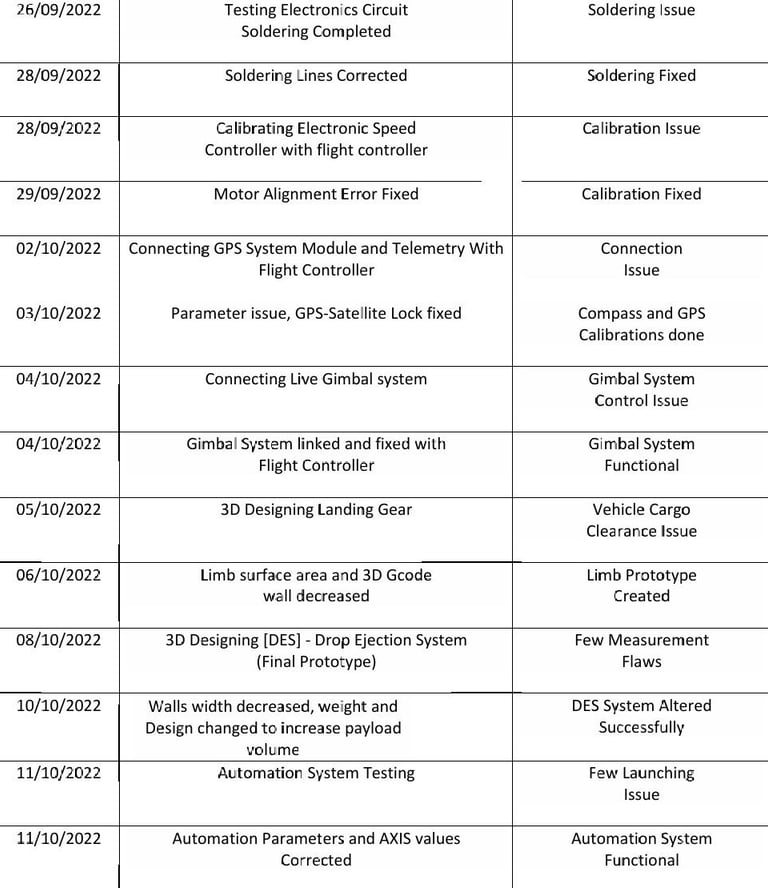
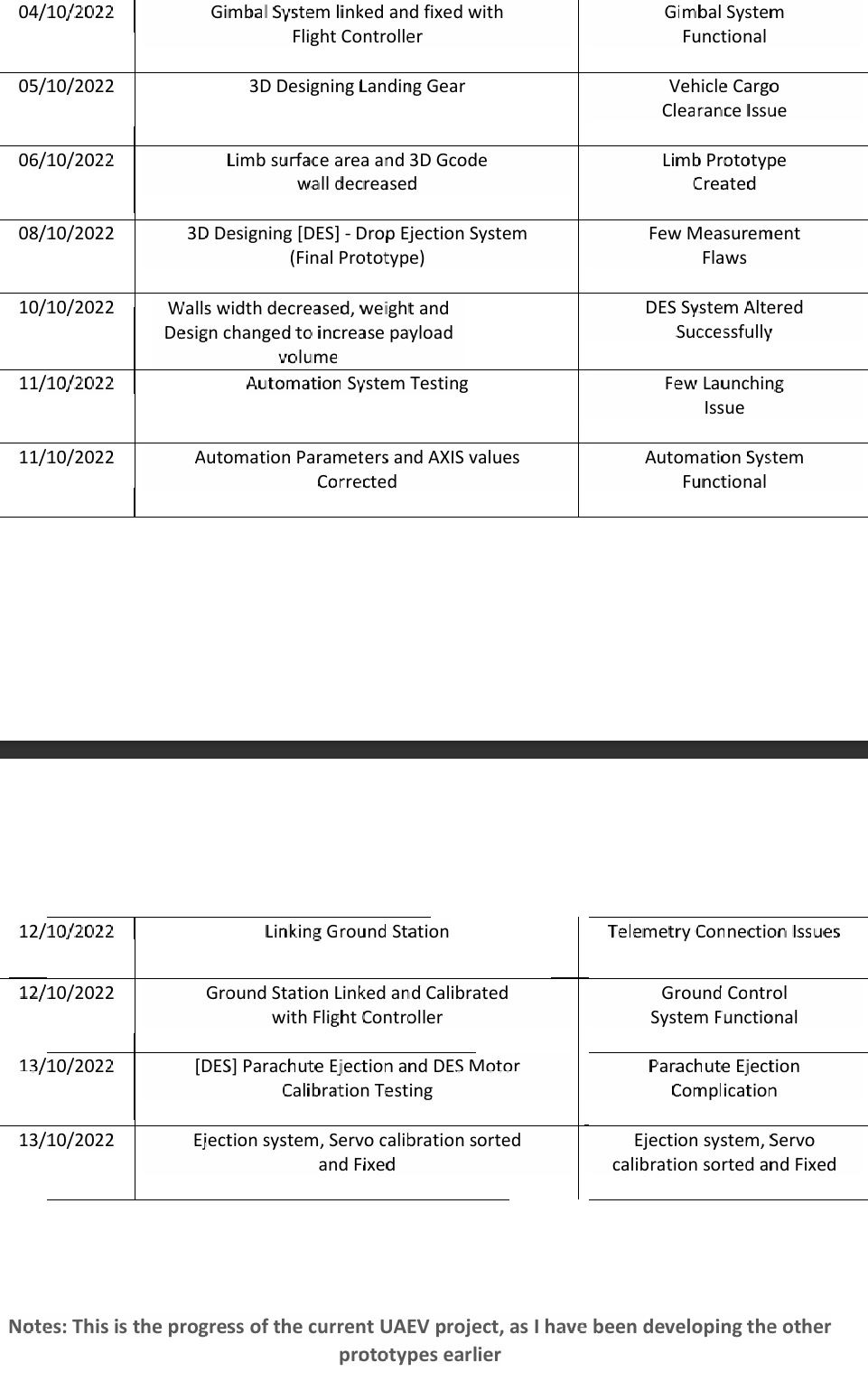
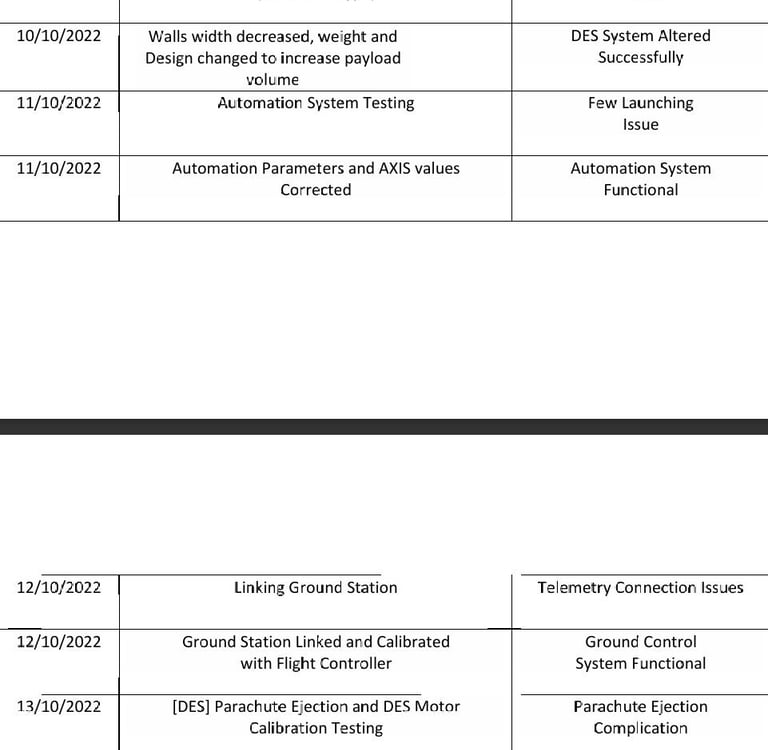
Early Development Logs