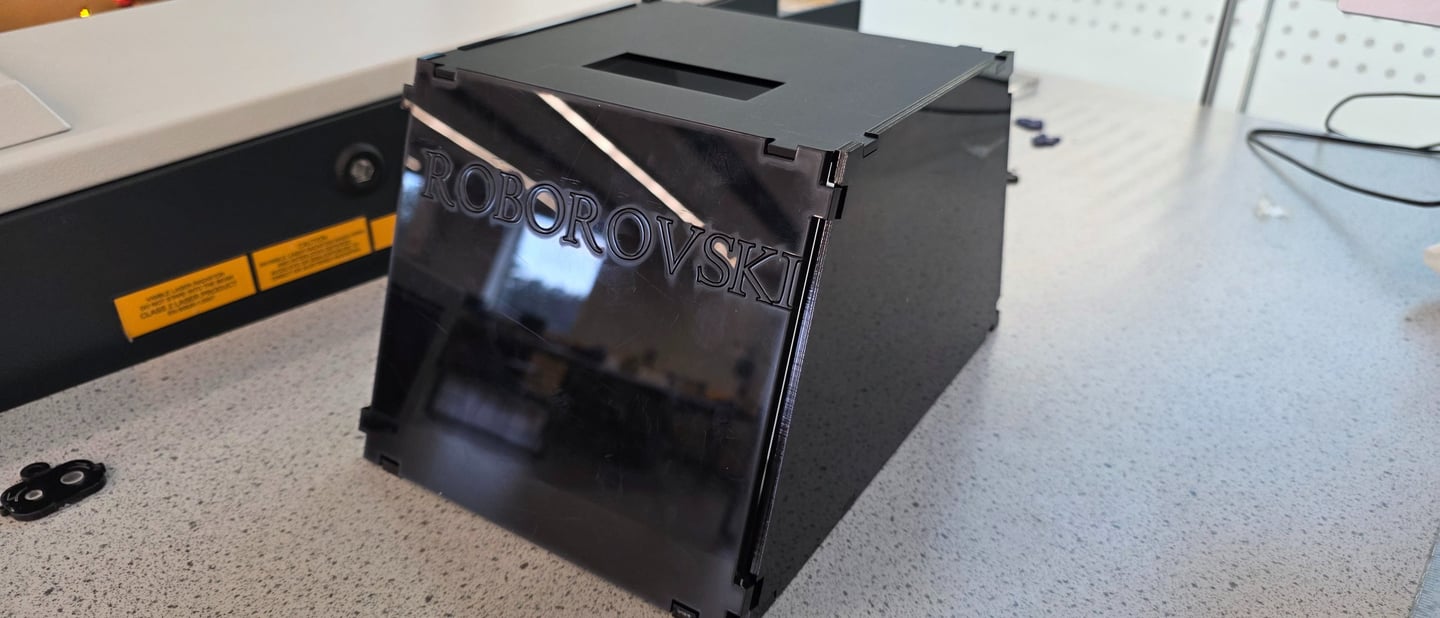
Waste Sorting Robot - ROBOROVSKI
Academic Group Project
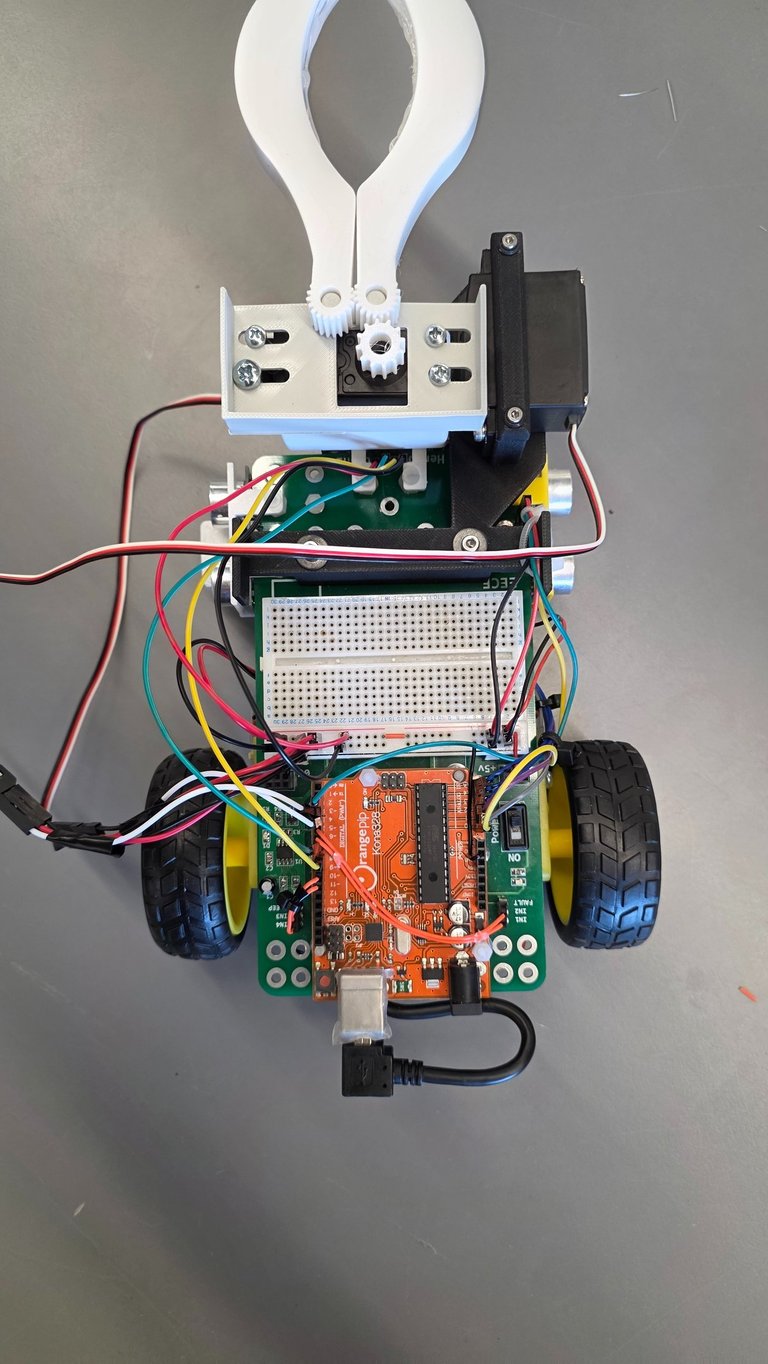
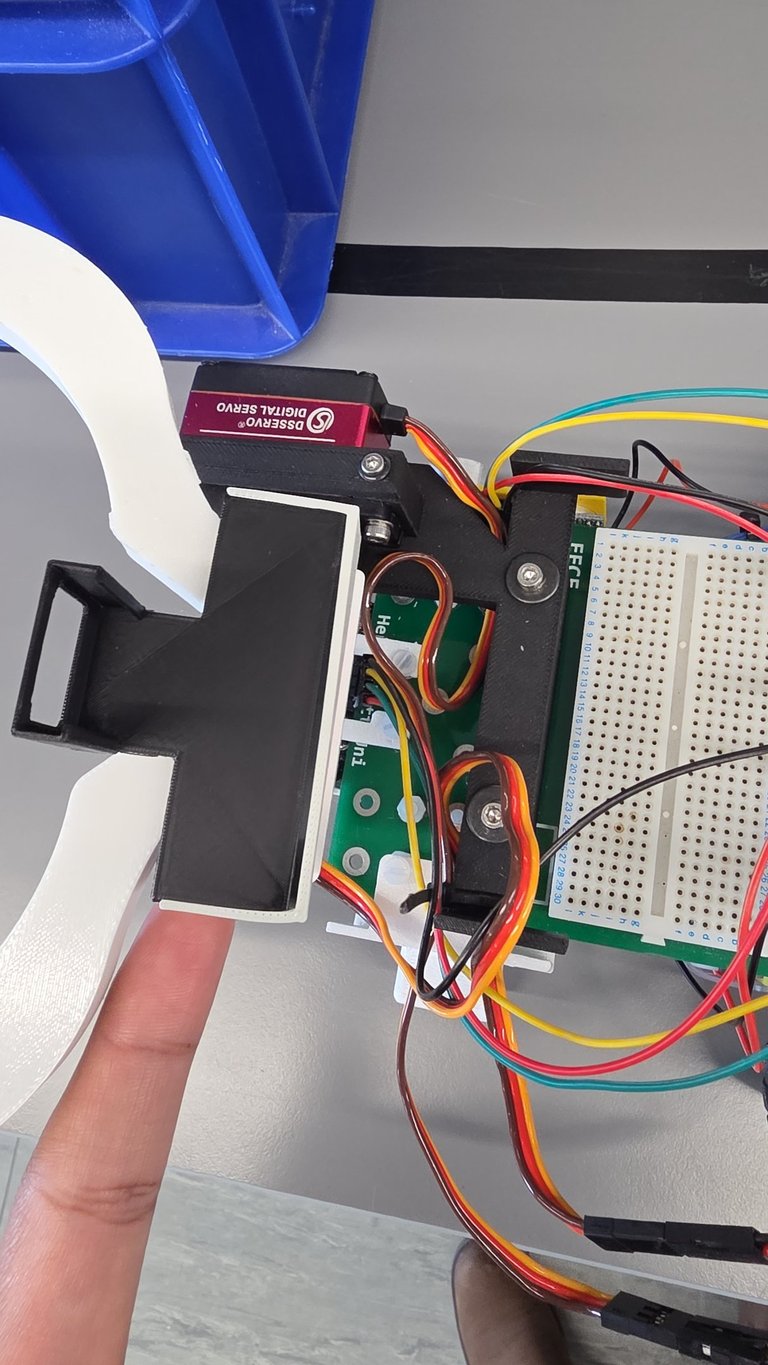
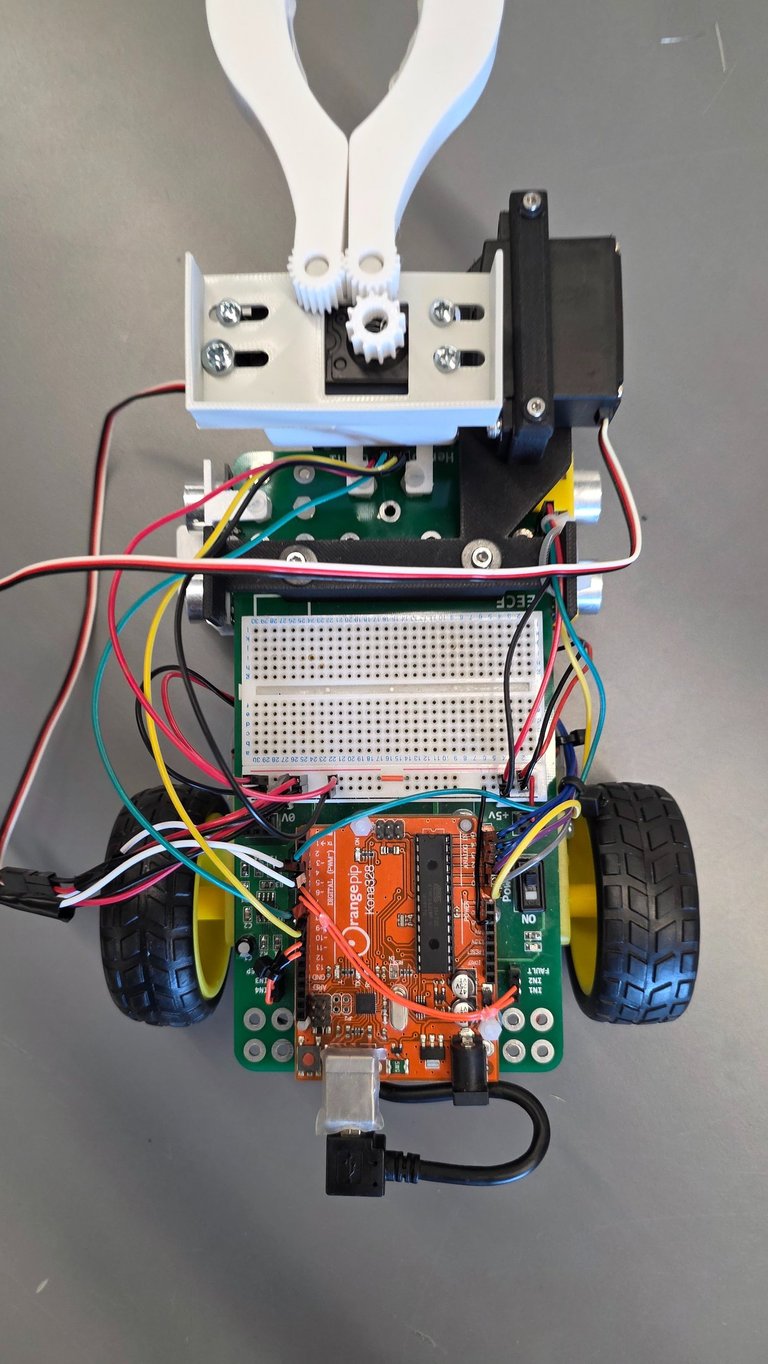
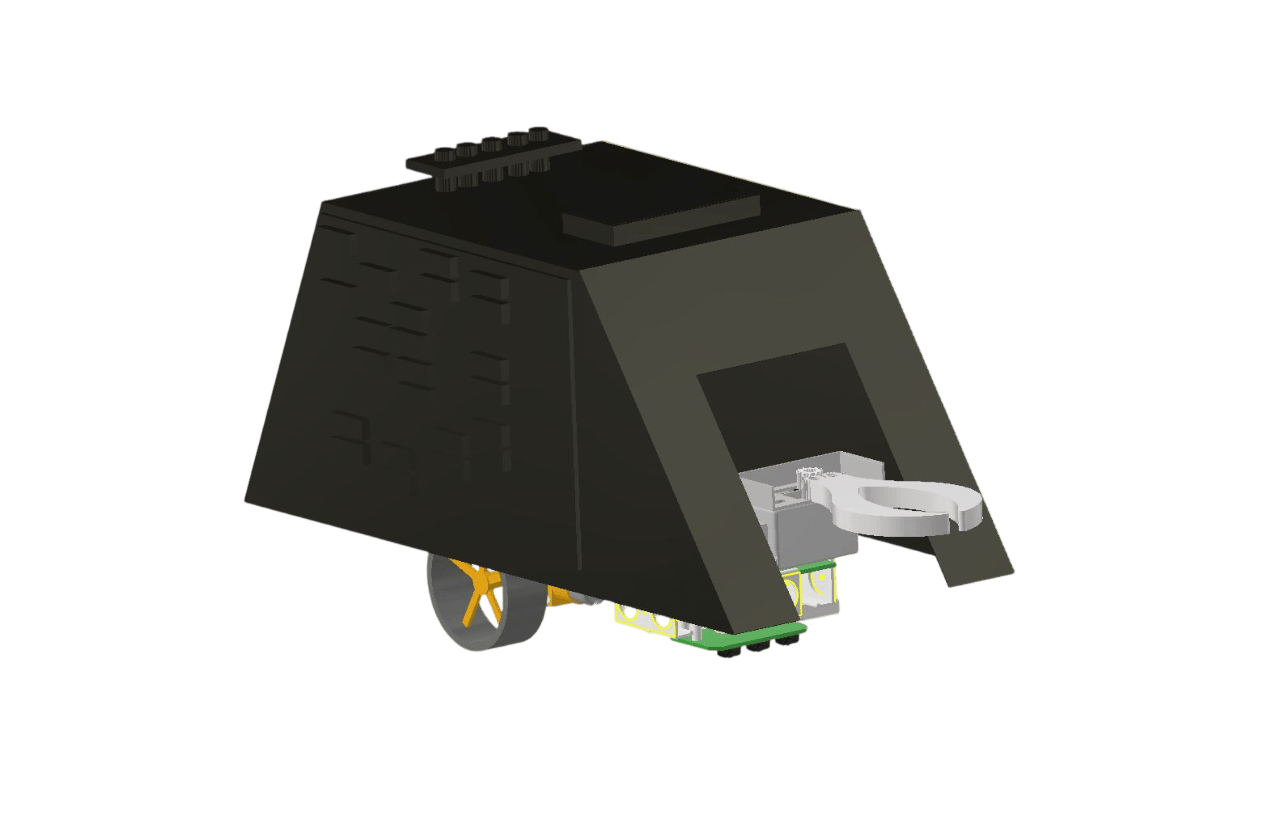
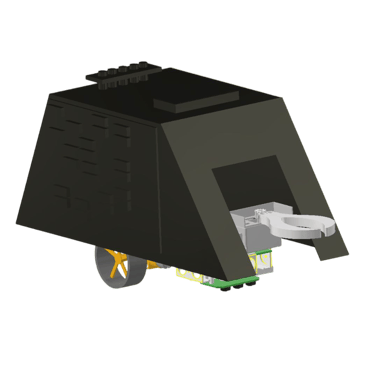
UGV - Unmanned Ground Vehicle
Fully 3D-Printed Chassis

Modular Chassis
Quick Access Panel
Lightweight Construction
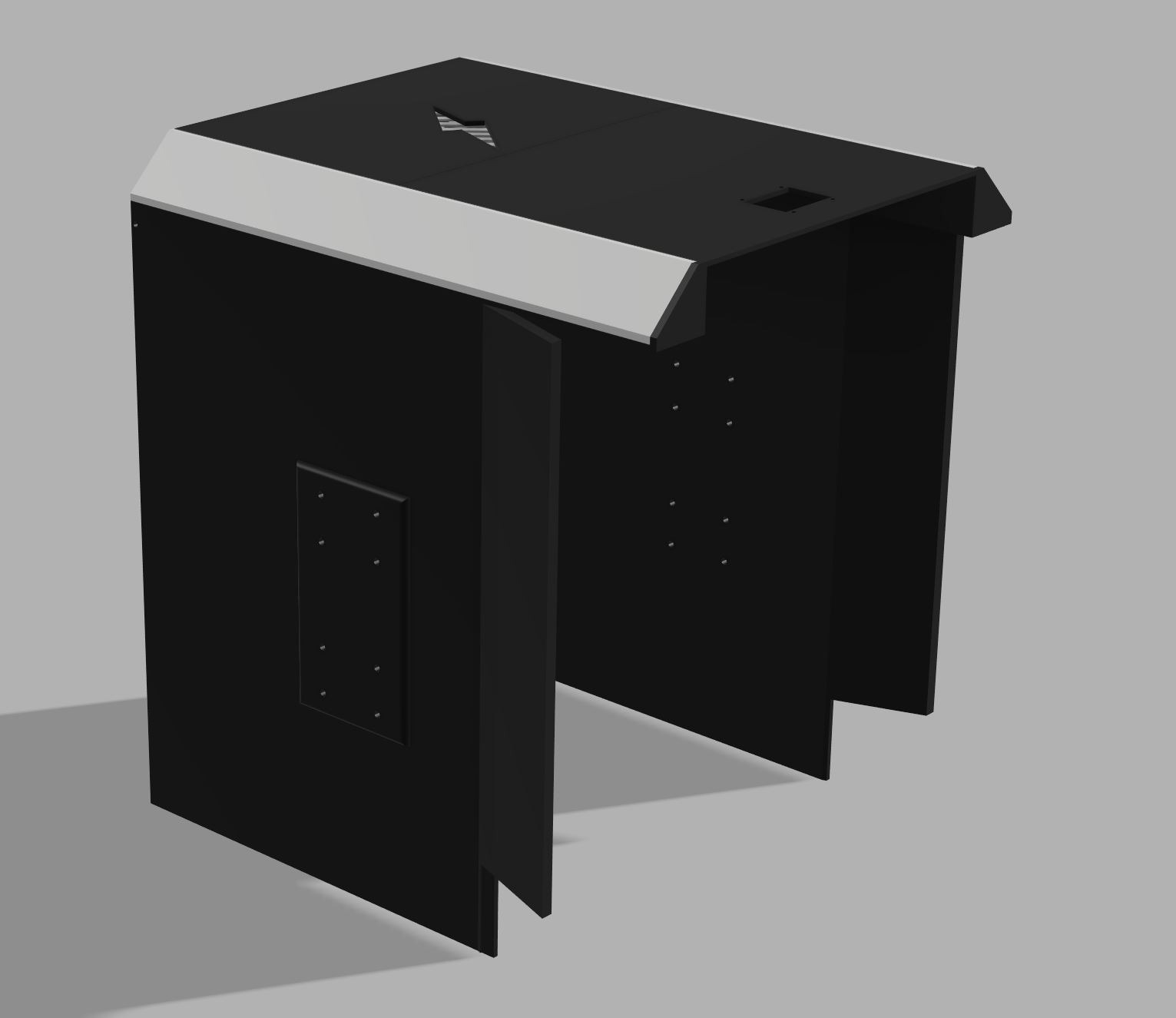
Docking Station
Allows Fully Autonomous operation
Simple and modular Construction
Hands-Free Docking & Charging