Autonomous Surface Vehicle
ASV
Mission Objective - Fully-Autonomous Debris Collection ASV
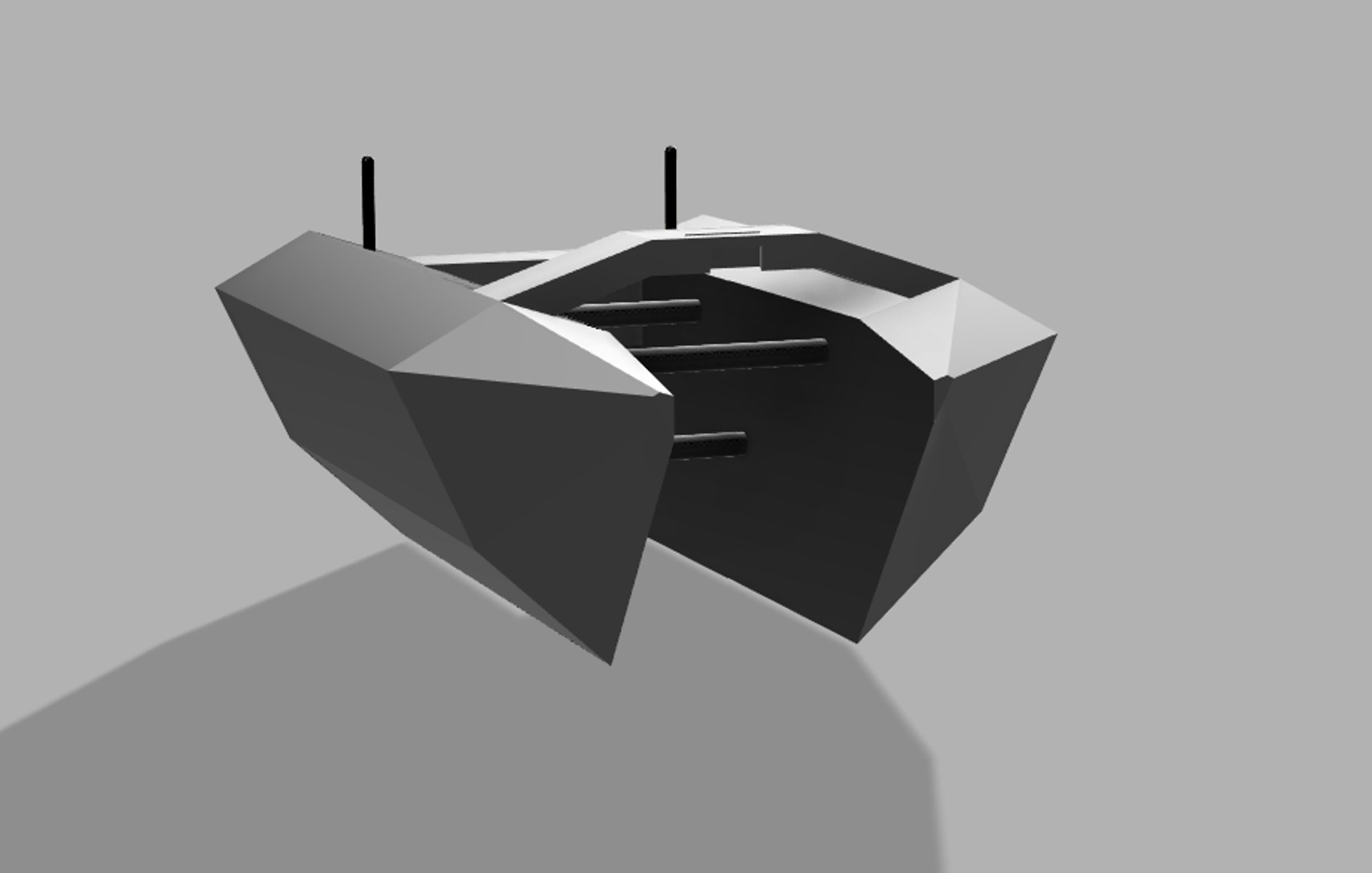
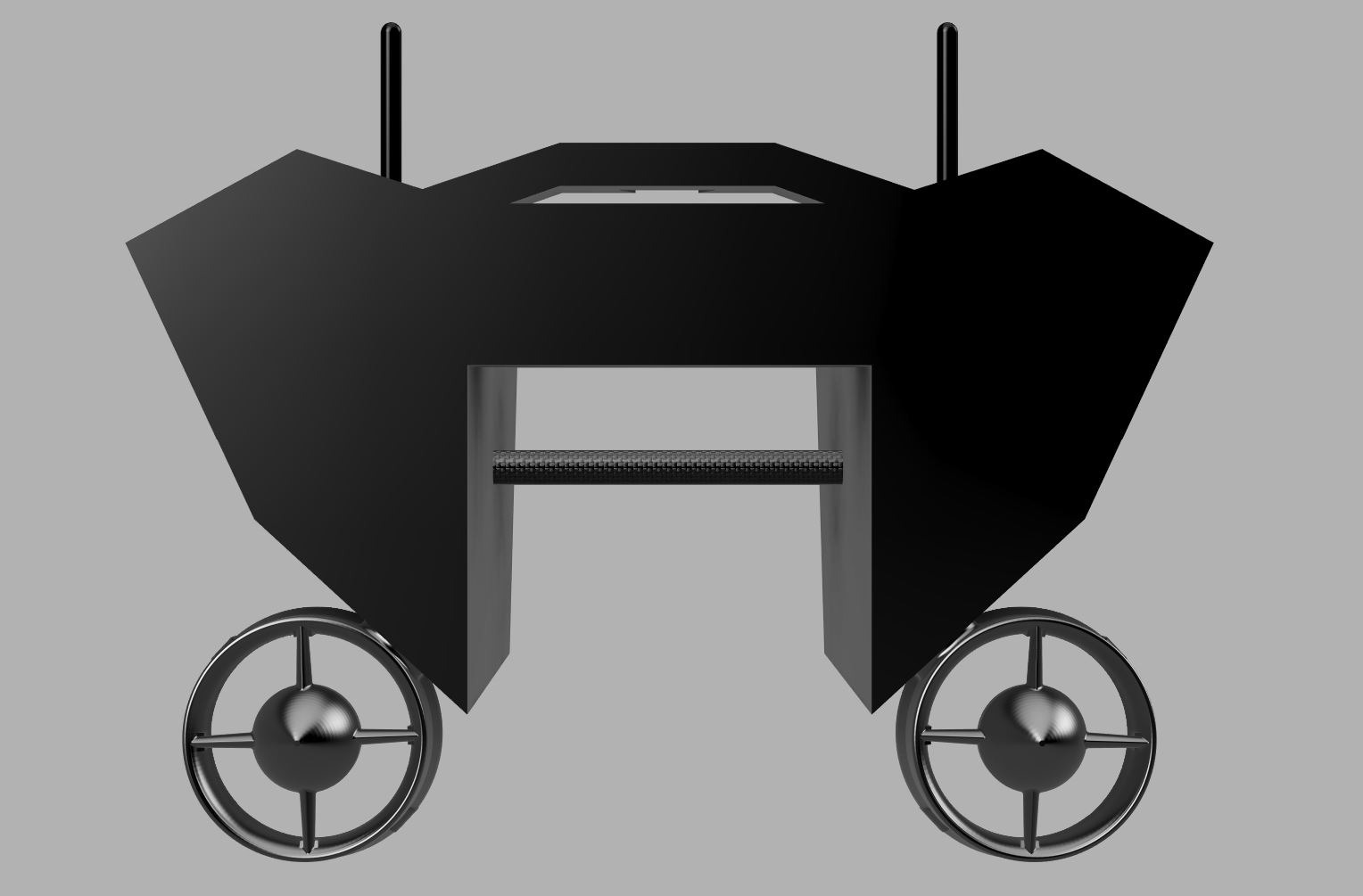
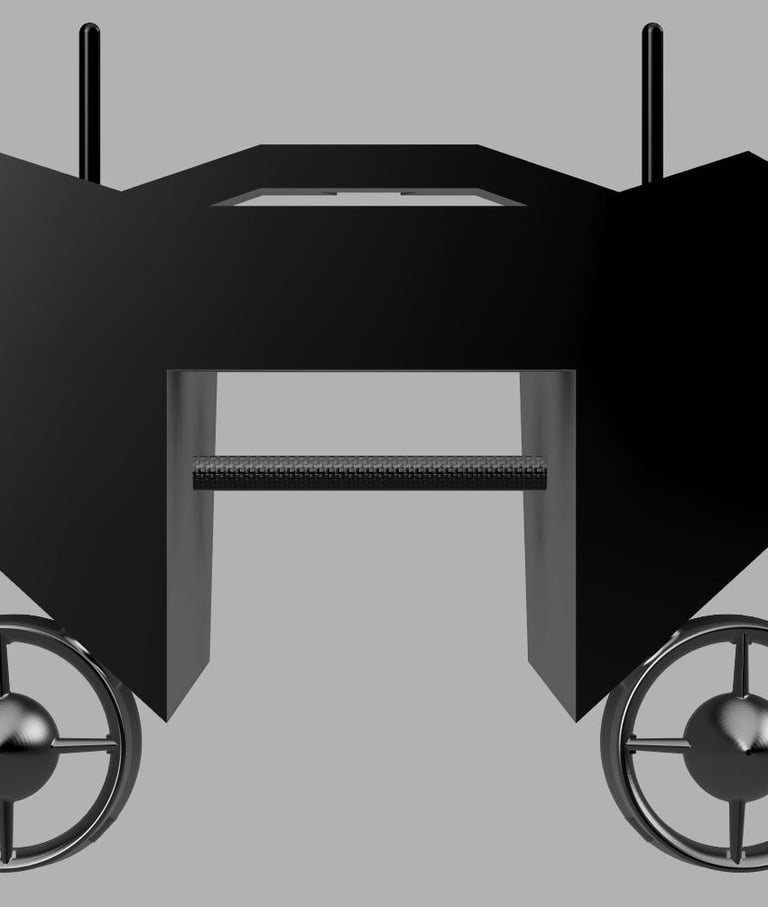
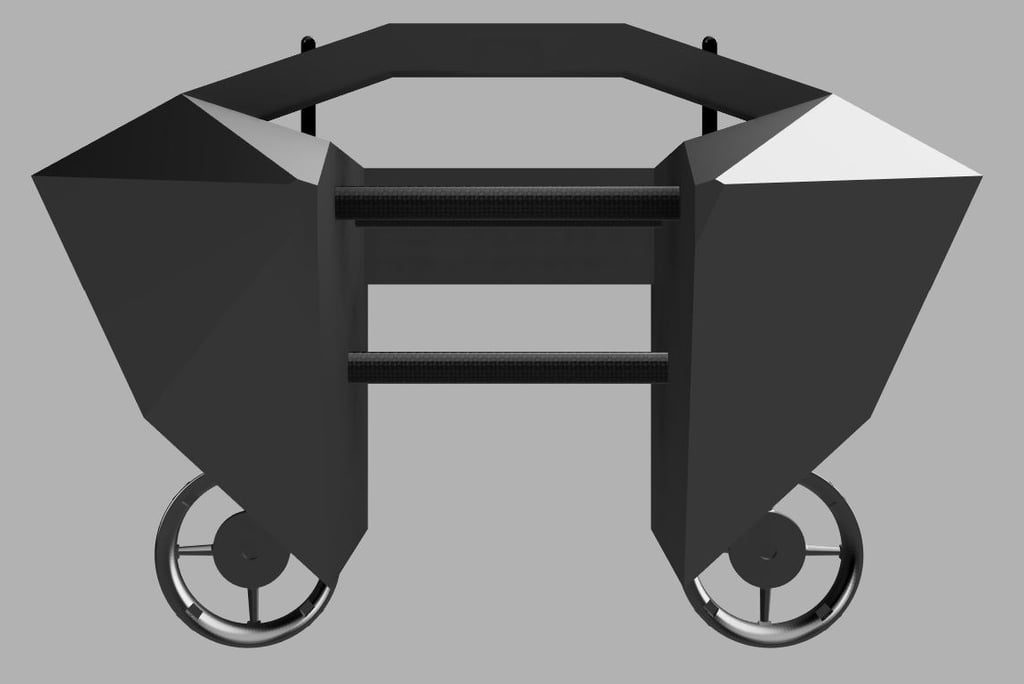
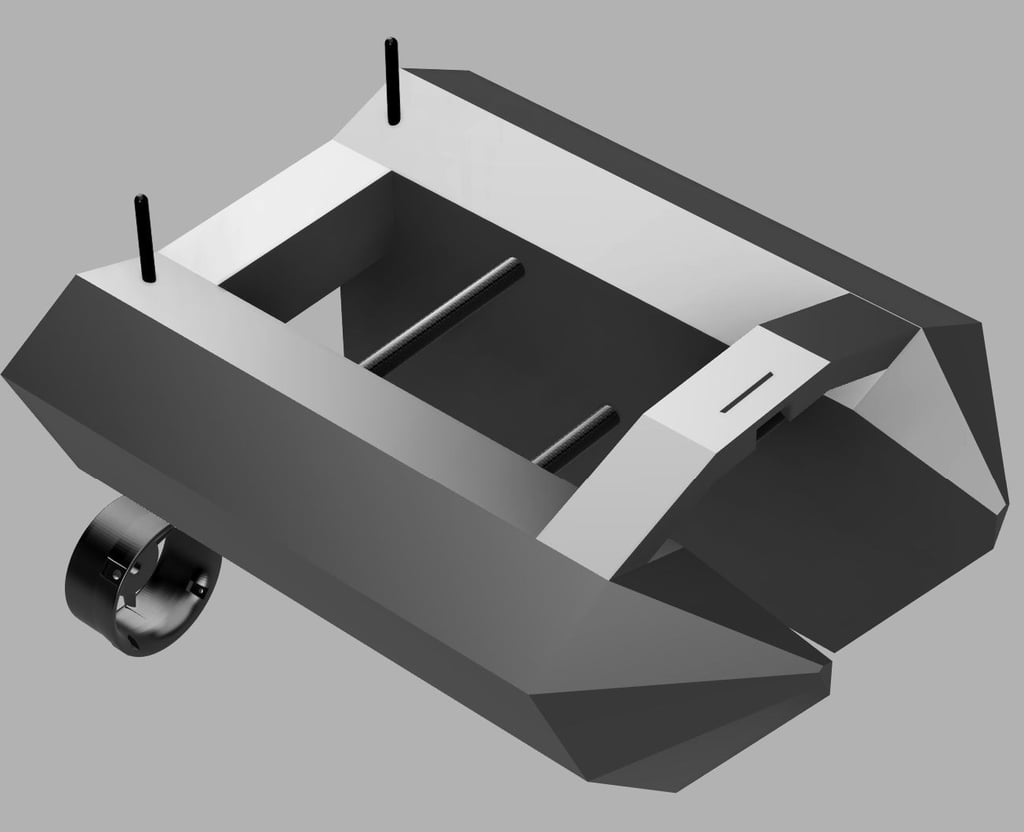
Dual-Hull Catamaran Design
Increased stability on water
Improved Payload distribution and Balance
Reduced risk of capsizing

Polymer based surface pore sealant for waterproofing
Carbon fiber structural cross-members
Fully 3D-Printed Hull Design
Fully-Autonomous
Fully Autonomous Navigation Capability
Manual Override via Ground Control Station
Predefined Waypoint Mission Execution