Project Valkyrie
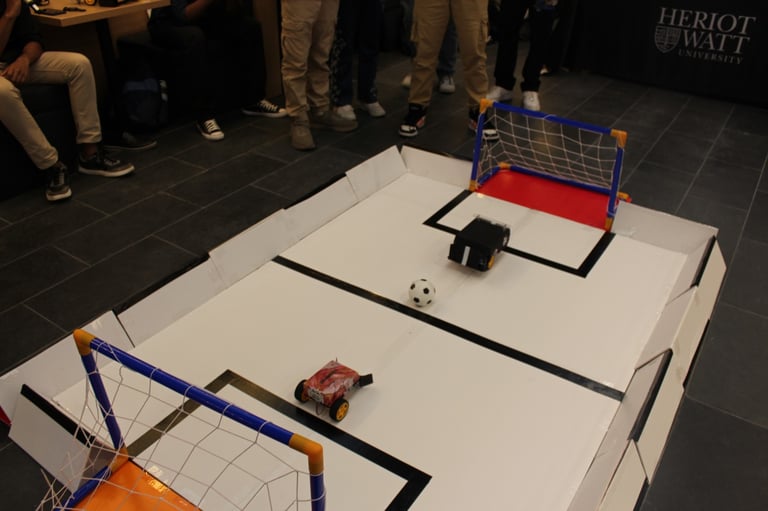
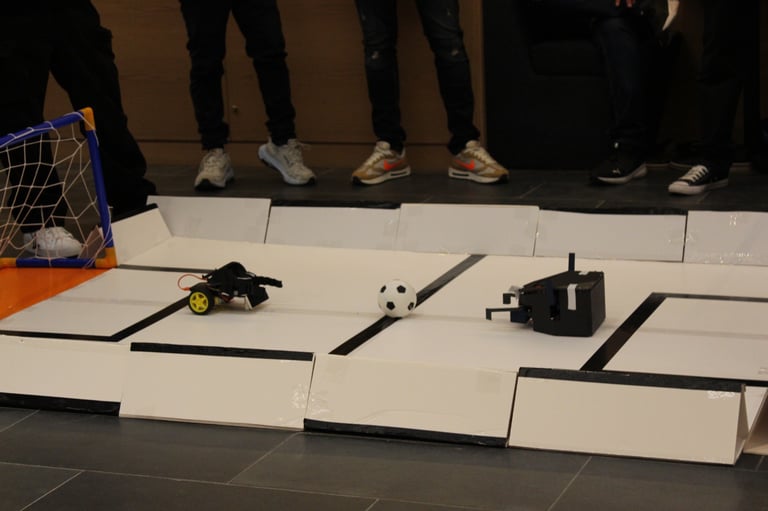
Mission objective - To develop a competitive robot for object control and strategic interaction
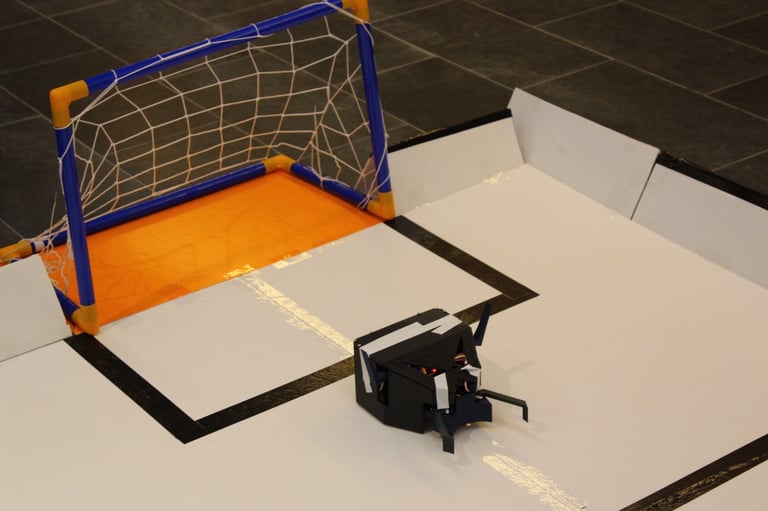
ROV-Valkyrie


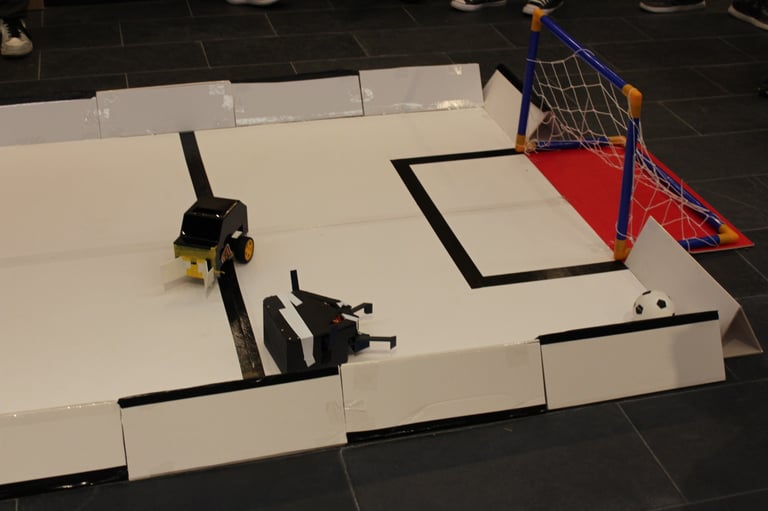
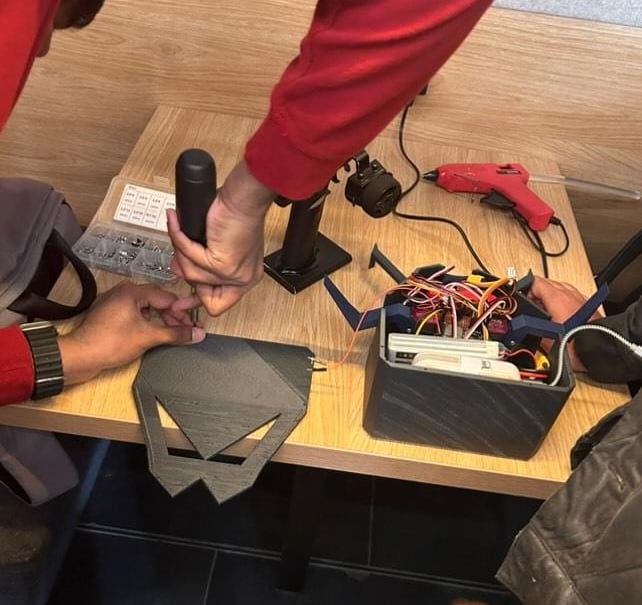
Pre Match preperation
Fully 3D-Printed Chassis
Valkyrie



2.4Ghz Low-latency Control
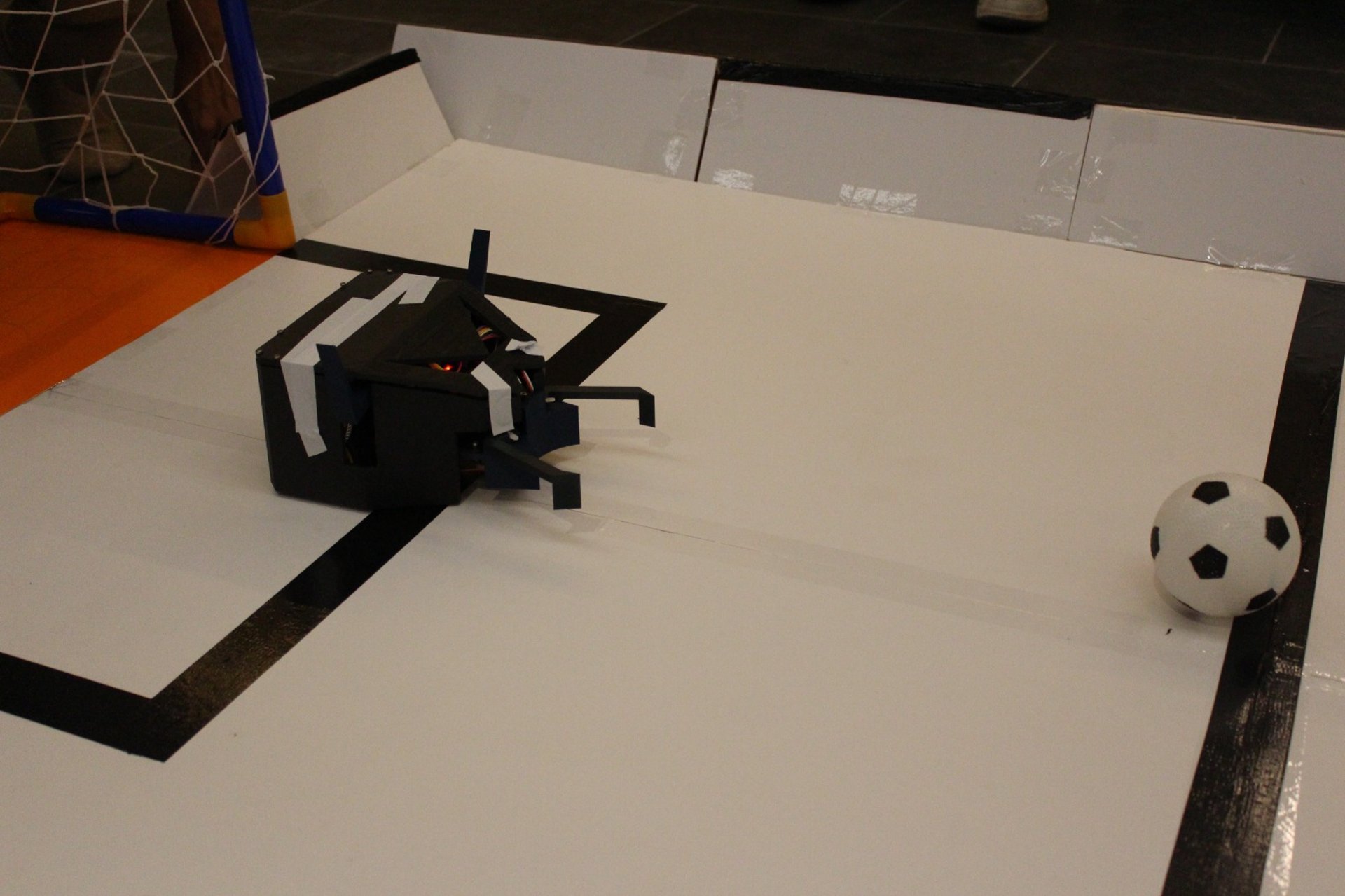
Side-mounted servo-actuated flippers capable of flipping or disrupting opposing robots
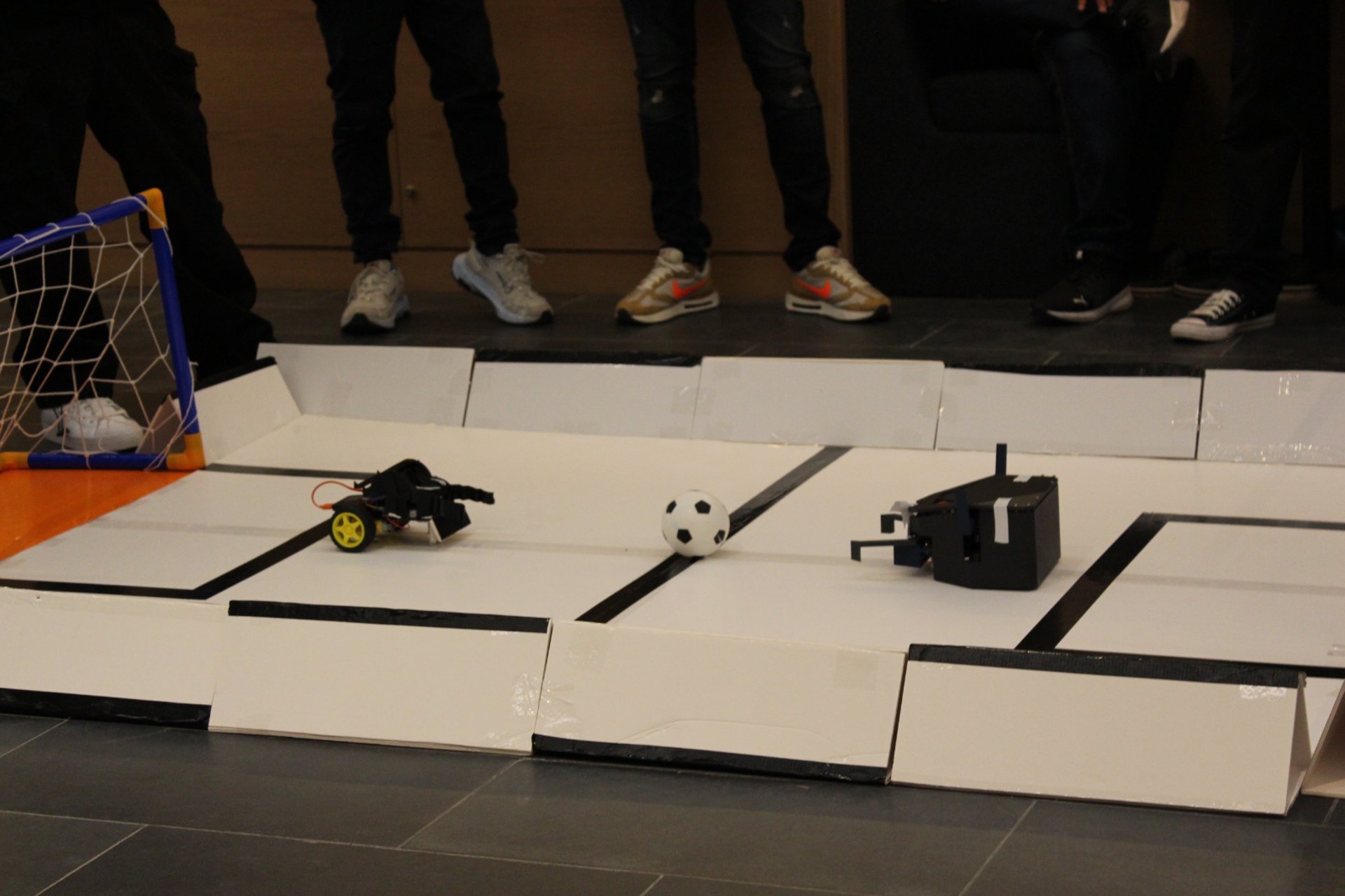
Compact and robust chassis designed for high-impact interactions
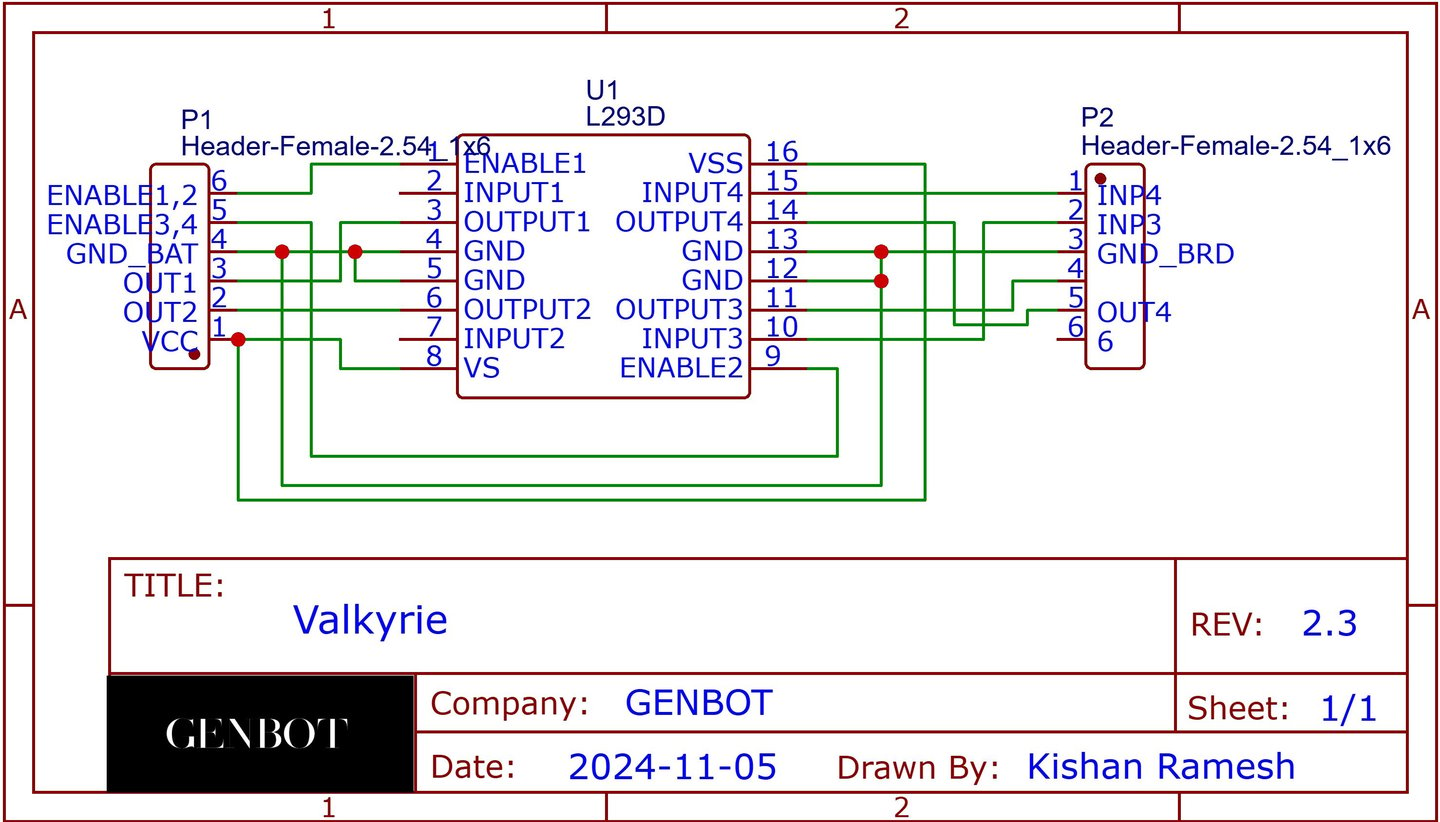
Circuit Schematic
Two L293D motor driver ICs were used in parallel (piggybacked) to increase current capacity, as each IC has a maximum current rating of 600 mA
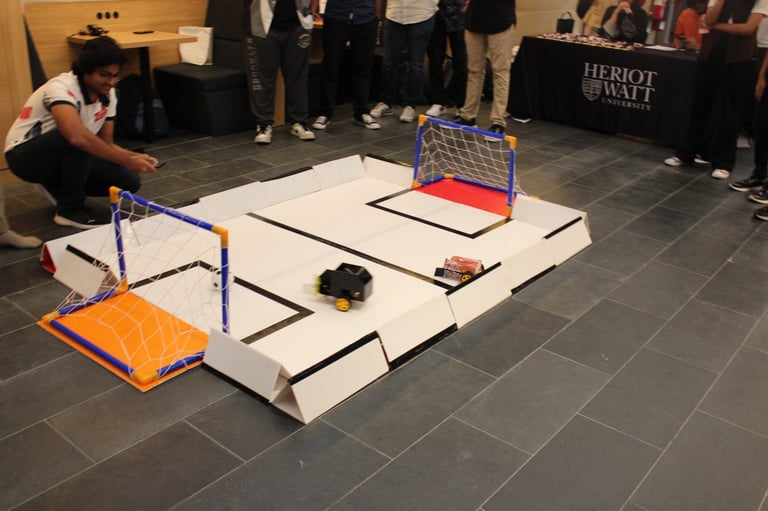
Achievement
1st Place
E4L Rocket league
Score : 11 - 1